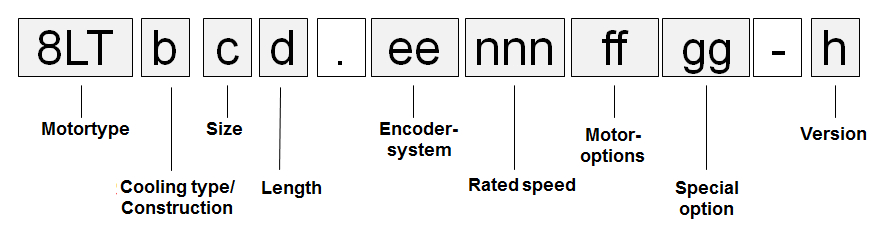
Cooling / Construction type (b)
Cooling / Construction type (b)
8LT three-phase synchronous motors with cooling / construction type A are self-cooling and are equipped with a ISO output flange. The motors must be installed on the cooling surface (flange).
8LT three-phase synchronous motors with cooling / construction type B are self-cooling and have a hollow shaft. The motors must be installed on the cooling surface (flange).
8LT three-phase synchronous motors with cooling / construction type J are based on motors with cooling type A and are liquid-cooled. The liquid-cooling increases the nominal torque (MN), nominal current (IN), stall torque (M0) and stall current (I0) by 70% as compared to the respective motors with cooling type A.
8LT three-phase synchronous motors with cooling / construction type K are based on motors with cooling type B and are liquid-cooled. Liquid cooling increases the nominal torque (MN), nominal current (IN), stall torque (M0) and stall current (I0) by 70% compared to the motors with cooling type B.
8LT three-phase synchronous motors with cooling / construction type Q are self-cooling and have a shaft with a blind hole. The motors must be installed on the cooling surface (flange).
8LT three-phase synchronous motors with cooling / construction type S are based on motors with cooling type Q and are liquid-cooled. The liquid-cooling increases the nominal torque (MN), nominal current (IN), stall torque (M0) and stall current (I0) by 70% as compared to the respective motors with cooling type Q.
Size (c)
Size (c)
8LT three-phase synchronous motors are available in size 9 and C.
Cooling type | Available sizes | |
|---|---|---|
9 | C | |
A | Yes | Yes |
B | Yes | --- |
J | Yes | Yes |
K | Yes | --- |
Q | Yes | Yes |
S | Yes | Yes |
Length (d)
Length (d)
8LT three-phase synchronous motors are available in up to six different lengths. They have different power ratings with identical flange dimensions. The various lengths can be differentiated by a number (d) in the model number (3, 4, 5, 6, 7, 8).
Length | Available for size | |
|---|---|---|
9 | C1) | |
3 | Yes1) | Yes |
4 | Yes | Yes |
5 | Yes | Yes |
6 | Yes | Yes |
7 | Yes | Yes |
8 | --- | Yes |
| 1) | Not for 8LTB/8LTK |
Encoder system (ee)
Encoder system (ee)
EnDat encoders
EnDat is a standard developed by Johannes Heidenhain GmbH that incorporates the advantages of absolute and incremental position measurement while also offering a read/write parameter memory in the encoder. With absolute position measurement (the absolute position is sampled serially), a homing procedure for referencing is usually not required. Where necessary, a multi-turn encoder (4096 revolutions) should be installed. It is also possible to use a single-turn encoder together with a reference switch, however. In this case, a homing procedure must be carried out. The incremental process allows the short deceleration periods necessary for position measurement when using drives with highly dynamic characteristics.
Different types of EnDat encoders can be used depending on requirements:
Name | Order code (ee) | |
|---|---|---|
E6 | E7 | |
Encoder type | EnDat single-turn | EnDat multi-turn |
Operating principle | Optical | Optical |
EnDat protocol | EnDat 2.1 | EnDat 2.1 |
Resolution | 2048-line | 2048-line |
Recognizable | --- | 4096 |
Accuracy | ±20" | ±20" |
Cutoff frequency | ≥ 400 kHz (-3 dB) | ≥ 400 kHz (-3 dB) |
Vibration during operation | ≤150 m/s² (IEC 60 068-2-6) | ≤150 m/s² (IEC 60 068-2-6) |
Shock during operation | ≤1000 m/s² (IEC 60 068-2-27) | ≤1000 m/s² (IEC 60 068-2-27) |
Manufacturer Internet address | Dr. Johannes Heidenhain GmbH www.heidenhain.de | |
Manufacturer's product ID | ECN1313 | EQN1325 |
EnDat 2.2 encoder
General information
Digital drive systems and position control loops with position measuring devices for determining measurement values require fast and highly secure data transfer from measurement devices. In addition, other data such as drive-specific characteristics, correction tables, etc. should also be available. To ensure a high level of system security, measurement devices must be integrated in routines for detecting errors and be able to perform diagnostics.
The EnDat interface from HEIDENHAIN is a digital, bidirectional interface for measurement devices. It is able to output position values from incremental and absolute measurement devices and can also read and update information on the measurement device or store new data there. Because it relies on serial data transfer, only 4 signal lines are needed. Data is transferred synchronously to the clock signal defined by the subsequent electronics. The type of transfer used (e.g. for position values, parameters, diagnostics, etc.) is selected using mode commands sent to the measurement device by the subsequent electronics.
Technical data
EnDat 2.2 encoders (single-turn or multi-turn) can be used depending on requirements.
Name | Order code (ee) | |
|---|---|---|
D0 | D1 | |
Encoder type | EnDat single-turn | En Dat multi-turn |
Operating principle | Optical | Optical |
EnDat protocol | EnDat 2.2 | EnDat 2.2 |
Position values per revolution | 33 554 432 (25-bit) | 33 554 432 (25-bit) |
Recognizable revolutions | --- | 4096 |
Accuracy | ±20" | ±20" |
Vibration during operation1) | ≤300 m/s2 (IEC 60068-2-6) | ≤300 m/s2 (IEC 60 068-2-6) |
Shock during operation Duration 6 ms | ≤1000 m/s2 / ≤2000 m/s2 (IEC 60068-2-27) | ≤1000 m/s2 / ≤2000 m/s2 (IEC 60068-2-27) |
Manufacturer Internet address | Dr. Johannes Heidenhain GmbH www.heidenhain.de | |
Manufacturer ID | ECN 1325 | EQN 1337 |
| 1) | In accordance with the standard at room temperature; the following values apply at a working temperature up to 100°C: ≤300 m/s2, up to 115°C: ≤150 m/s2; 10 to 55 Hz constant path 4.9 mm peak to peak. |
Magnetic, only for 8LTB/8LTK hollow shaft motors
Encoder type / Order code | M0 |
|---|---|
Operating principle | Magnetic |
EnDat protocol | 2.2 |
Functional safety | No |
Single-turn / Multi-turn | S |
Revolutions | 1 |
Resolution [bits single-turn / bits multi-turn] | 14/0 |
Precision | Absolute after 18 degrees |
Vibration during operation - Stator Max [m/s2] | 300 |
Vibration during operation - Rotor max [m/s2] | 300 |
Shock during operation max [m/s2] | 1000 |
Manufacturer's product ID | ERM 2410 |
Manufacturer's website | www.heidenhain.de |
EnDat 2.2 encoder – Safety-related position measurement systems
In machine and system manufacturing, the topic of safety is becoming more and more important. This is mirrored in legislation and stricter safety criteria in national and international standards. Most importantly, stricter requirements serve to protect personnel, but they also increasingly serve to protect property and the environment. The goal of functional safety is to minimize or eliminate dangerous situations that can occur in machines and systems either with or without operational errors. This is generally achieved by implementing redundant systems. Moving axes in safety-oriented applications require position information in order to be able to carry out their corresponding safety functions. Different system configurations can be implemented to get independent position values. One possibility is using two measuring instruments per axis. To keep costs down, the aim is often to create a solution with only one position measuring instrument. Until now, analog measuring instruments with sine/cosine signals were used for this purpose. The encoder manufacturer Heidenhain – as the first manufacturer with the purely serial EnDat 2.2 protocol for safety position measurement systems – offers a serial single-encoder solution in accordance with IEC 61 508 SIL2. All the advantages of serial data transfer – such as cost optimization, diagnostics possibilities, automatic commissioning and high-speed generation of position values – can now benefit safety applications as well.
100% inspection during production and additional measures during final testing ensure errors have not occurred related to shaft and coupling connections on rotary encoders when using motors with S encoders (in accordance with EN ISO 13849-2).
There are also a number of safety functions that are already possible with D encoders.
Information regarding the area of application and the procedure for setting up various safety functions can be found in the "ACOPOSmulti SafeMOTION" user's manual. (Model number: MAACPMSAFEMC-GER ACOPOSmulti SafeMOTION or in the Downloads section of our website)
Technical data
EnDat 2.2 encoders can be used for functional safety in single-turn or multi-turn form, depending on requirements.
Name | Order code (ee) | |
|---|---|---|
S0 1) | S1 1) | |
Encoder type | EnDat single-turn functional safety | EnDat multi-turn functional safety |
Operating principle | Optical | Optical |
EnDat protocol | EnDat 2.2 | EnDat 2.2 |
Position values per revolution | 33 554 432 (25-bit) | 33 554 432 (25-bit) |
Recognizable revolutions | --- | 4096 |
Precision | ± 20" | ± 20" |
Vibration during operation2) | ≤300 m/s2 (IEC 60068-2-6) | ≤300 m/s2 (IEC 60 068-2-6) |
Shock during operation Duration 6 ms | ≤1000 m/s2 / ≤2000 m/s2 (IEC 60068-2-27) | ≤1000 m/s2 / ≤2000 m/s2 (IEC 60068-2-27) |
Manufacturer Internet address | Dr. Johannes Heidenhain GmbH www.heidenhain.de | |
Manufacturer's product ID | ECN 1325 | EQN 1337 |
| 1) | Not available for size 2. |
| 2) | In accordance with the standard at room temperature; the following values apply at a working temperature up to 100°C: ≤300 m/s2, up to 115°C: ≤ 150 m/s2; 10 to 55 Hz constant path 4.9 mm peak to peak |
Nominal speed (nnn)
Nominal speed (nnn)
8LT three-phase synchronous motors can be delivered with three different nominal speeds:
Size | Available nominal speeds nN [rpm] | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
80 / 1001) | 300 | 500 | 1000 | |||||||||||||||||||
9 | --- | --- | --- | --- | --- | --- | Yes | Yes | Yes | Yes | Yes | --- | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes |
C1) | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | --- | --- | --- | --- | --- |
Length | 3 | 4 | 5 | 6 | 7 | 8 | 31) | 4 | 5 | 6 | 7 | 8 | 31) | 4 | 5 | 6 | 7 | 31) | 4 | 5 | 6 | 7 |
| 1) | Not for 8LTB/8LTK |
Oil seal (ff)
Oil seal (ff)
All 8LT three-phase synchronous motors are available with an optional Form A oil seal according to DIN 3760. When equipped with an oil seal, the motors have IP65 protection in accordance with EN 60034-5.
Proper lubrication of the oil seal must be ensured throughout the entire service life of the motor.
Special motor options (gg)
Special motor options (gg)
00...No special motor options
Motor version (h)
Motor version (h)
The motor version is automatically specified by the configurator and can be seen in the technical data.
Order code motor options (ff)
The respective code (ff) for the order key can be found in the following table:
Motor options | |||
|---|---|---|---|
Shaft end | Connectiondirection | Oil seal | Code for the order key (ff) |
ISO flange / blind hole / hollow shaft | Motor and encoder connectors - angled (swivel) | No | F0 |
Yes | F3 | ||
Motor connector - straight, Encoder connector - swivel (angled) | No | F6 | |
Yes | F9 | ||
Example order 1
Example order 1
A torque motor of type 8LSA45 with a nominal speed of 300 rpm has been selected for an application. The motor should have a 2048-line EnDat single-turn encoder. Both the motor and the encoder plugs should be swivel plugs.
The code (ee) for the encoder system is E6.
The code (nnn) for a nominal speed of 300 rpm is 003.
The code (ff) for the other options (connection direction) is F0.
The model number for the required motor is 8LTA93.E6003F000-0
Example order 2
Example order 2
A three-phase synchronous motor of type 8LTJ97 with a nominal speed of 500 rpm has been selected for an application. The motor should have an oil seal and a 2048-line EnDat multi-turn encoder. The male motor connector should have a straight connection. The male encoder connector should have a "swivel (angled)" connection.
The code (ee) for the encoder system is E7.
The code (nnn) for a nominal speed of 500 rpm is 005.
The code (ff) for the other options (oil seal and connection direction) is F9.
The model number for the required motor is 8LTJ97.E7005F900-0